中国团队报告首次成功将基因编辑猪肝脏移植人体
时间:2025-04-02 09:02:18 出处:百科阅读(143)
新华社伦敦/西安3月26日电(记者蔺娟 郭爽)中国研究团队伦敦时间26日在英国《自然》杂志在线发表论文,中国报告世界首例将基因编辑猪的团队肝脏移植到脑死亡人体内的成功案例,移植的报告九游肝脏各项生理功能表现良好,这将有助于解决移植器官短缺问题。首次
中国科学院院士窦科峰带领西京医院等机构的成功研究团队,以一只经过6处基因编辑的将基辑猪猪为供体,将猪的因编移植肝脏移植到一名已脑死亡但身体基本机能仍被维持的人的体内,人类受体自身的肝脏肝脏被保留,以此模拟临床肝衰竭患者的人体替代支持治疗过程。
“我们观察到,中国移植的团队九游经基因编辑的猪肝脏在人体内能够发挥生理功能,正常分泌胆汁,报告血供和病理结果均良好。首次”窦科峰对新华社记者介绍,成功在移植后的将基辑猪10天观察期内,未见超急性排斥反应,未发现猪内源性逆转录病毒在人体传播的情况。
《自然》杂志专门就这篇论文举行在线记者会,介绍这是已知的全球首个将基因编辑猪的肝脏移植给脑死亡人类受体的成功案例,论文发表标志着这项去年3月完成的研究成果得到国际学术界承认。《自然》网站相关报道表示这是“将动物器官移植给人的一个里程碑”。
英国牛津大学移植学教授彼得·弗兰德评价说,“这是一项重要的研究”,推动了从动物向人类的异种器官移植科研领域的发展,手术技术“非常精妙”,表明在临床上应用相关技术是可行的。
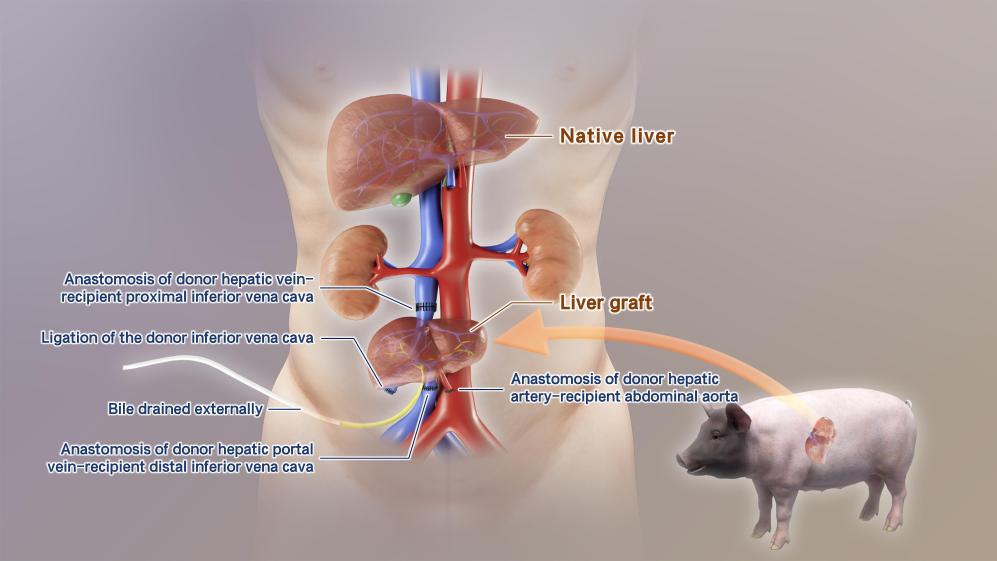
本次研究中基因编辑猪肝脏移植示意图。(研究团队供图)
据介绍,这项研究的手术方案先后通过相关的学术委员会、伦理委员会等论证,严格按照国家有关规定逐项进行。人类受体为一例重型闭合性颅脑损伤患者,经全力抢救仍脑死亡,患者家属同意无偿参与异种肝移植科学研究,为医学进步作出贡献。移植研究在10天后因家属意愿终止。
近年来,在基因编辑等新技术推动下,以猪作为供体的异种器官移植取得较大进展。猪的一些器官与人类器官大小和功能相似,经过基因编辑后可以减少免疫排斥反应等风险。全球医学界近年已报告了基因编辑猪的心脏、肾脏移植到人体的多个案例,这些研究将有助于解决可供移植的器官短缺这个世界难题。
下一篇: 2个小时查处4起酒后驾车